
La zona geográfica condiciona las propias conexiones a la red eléctrica, tanto en su forma como en su frecuencia y voltaje. Esto produce serias dificultades cuando se viaja, como ya había quedado patente en los Simpsons con el testimonio del video de la luna de miel de Patty.

Pero, incluso con la conexión a red unificada, los distintos dispositivos de uso diario como portátiles o teléfonos móviles presentan una gran diversidad de cargadores y conexiones. Un temor que nos puede asaltar a la hora de contemplar la compra de un vehículo eléctrico es su compatibilidad con instalaciones de carga públicas o futuras tecnologías de carga. En este sentido se está trabajando para lograr sistemas estándar y unificados. Aunque este objetivo no se ha logrado por completo, sí que existen unas opciones entre las que, presumiblemente, surgirá el estándar más extendido.

Además, la carga de vehículos eléctricos implica un consumo de energía relativamente alto. Para que nos hagamos una idea, una carga lenta (la que necesita menos potencia) suele consumir unos 16 amperios de la toma monofásica de 220 V europea. Esto significa un consumo máximo de unos 3.5 kW de potencia. En el caso del sistema americano la potencia es aproximadamente la mitad para una toma de 110 V, pero la carga dura el doble. Si pensamos en los aparatos de mayor potencia que utilizamos a diario se nos puede ocurrir un secador de pelo, un calefactor, un calentador eléctrico de agua, un horno, una vitrocerámica... todos ellos se encuentran habitualmente por debajo de 3.5 kW de consumo máximo. Incluso la potencia básica que se puede contratar para una vivienda es inferior a este valor. Si se desea realizar la carga más rápidamente la potencia debe aumentar y ya se hace necesaria una conexión trifásica. Por lo tanto, ya no sólo se necesita una estandarización, también se requiere una seguridad en la operación debido a las altas potencias utilizadas.

Cuando se plantea la instalación de un punto de recarga para vehículos eléctricos hay que elegir entre una serie de opciones, que dependerán de condicionamientos como la infraestructura eléctrica disponible, la localización, el uso al que se encuentre destinado...
Existen 2 tipos de tecnologías principales: la carga conductiva y la inductiva.
- La carga inductiva tiene la principal ventaja de que no hay contactos eléctricos y las diversas propuestas permiten incluso la instalación del sistema bajo el suelo y la carga del vehículo estacionado encima. Como contrapartida, su rendimiento es menor y su uso se encuentra menos extendido.

- La carga conductiva se basa en contactos eléctricos, como sucede en un enchufe ordinario. Es la que cuenta con un mayor rendimiento y, hoy en día, su nivel de implantación es mayor. Sus principales características se describen a continuación.
El estándar más extendido que regula los detalles relacionados con el proceso de carga conductivo es el conocido como IEC 62196, que define características técnicas, incluyendo mecanismos de comunicación entre el vehículo y la estación, pero sin crear estándares para los conectores. Está definido por la Comisión Internacional Electrotécnica (International Electrotechnical Commission, IEC). Los diversos formatos de enchufes desarrollados acostumbran a tener un protocolo propio de comunicación y carga, pero se encuentran englobados dentro de las definiciones que realiza el estándar IEC 62196. En su desarrollo se definen 4 modos para caracterizar los tipos de procesos de carga:
-Modo 1, carga lenta desde una toma eléctrica doméstica:

Este primer modo define la carga desde la red de suministro de corriente alterna a través de enchufes domésticos que no excedan los 250 voltios en el caso de corriente alterna monofásica o los 480 voltios para corriente alterna trifásica. No se requieren contactos de control y se incide en la necesidad de respetar los reglamentos locales en caso de ser más restrictivos que esta norma. En algunos casos, como por ejemplo USA, este tipo de carga está prohibida debido a que no todas las instalaciones domésticas poseen la toma de tierra necesaria.
-Modo 2, carga lenta desde una toma eléctrica doméstica con un dispositivo de protección y control embebido en el cable de conexión:

En este caso también se utiliza la red de suministro de corriente alterna, hasta 250 voltios y 32 amperios en el caso de tensión monofásica y 480 voltios y 32 amperios para la red trifásica. Es necesario utilizar toma de tierra y el dispositivo de protección y control situado entre la toma doméstica y el vehículo dispone de un conector de gestión que regula la carga en función de distintos parámetros mediante comunicación con el coche.
-Modo 3, carga lenta o rápida mediante toma de corriente con equipamiento específico y funciones de protección y control embebidas:

Este modo utiliza un equipamiento dedicado y conectado de forma permanente al suministro de corriente alterna. Estos dispositivos necesitan diversos contactos de señal y control en ambos extremos del cable de conexión y permiten que no exista tensión en el conector que va al vehículo si éste no está enchufado. Además, los protocolos de comunicación entre vehículo y estación permiten que se integren en los modelos “smart grid” o redes de distribución inteligentes.
-Modo 4, carga rápida utilizando un cargador externo:

En los modos anteriores se acondicionaba la toma eléctrica con diversos grados de complejidad, pero la carga siempre se realiza mediante un sistema a bordo del vehículo, que acondiciona la potencia eléctrica y la rectifica para obtener la corriente continua que las baterías almacenan y suministran. En este modo es la propia estación de carga la que realiza también estos procesos y suministra al vehículo corriente continua, permitiendo conseguir las cargas más rápidas.
A medida que se avanza sobre los distintos modos mejoran la gestión, la protección y las posibilidades pero también se encarece notablemente la instalación.
Dentro de estos modos surgen diversos tipos de conectores, con elevados índices de protección que posibilitan usarlos en ambientes cotidianos. Los más habituales se listan a continuación:
•Tipo 1: SAE J1772 o Yazaki.
Es un conector propuesto por la Sociedad de Ingenieros Americanos (Society of American Engineers, SAE) y es el estándar en USA. Engloba no sólo el propio dispositivo físico sinó la comunicación y los protocolos utilizados. El aspecto del conector es el siguiente:

Tiene forma circular con 43 mm de diámetro y está compuesto por 5 pines: 2 correspondientes a la línea alterna monofásica (del mismo tamaño), uno de tierra, uno de control de proximidad (evita que el coche se mueva cuando está conectado) y uno de control. El conector de control utiliza una onda cuadrada (+-12 V.) de 1 kHz de frecuencia que controla la presencia del vehículo, regula la máxima intensidad de carga permisible y el proceso. La posición en el conector de estos pines se muestra en la siguiente imagen:

Está diseñado para varios niveles de potencia en corriente alterna:
•Nivel 1: Suministros monofásicos de 120 voltios y una intensidad de carga de hasta 16 amperios (hasta 2 kW)
•Nivel 2: Suministros de fase partida de 240 voltios y una intensidad de carga de hasta 80 amperios (hasta 19 kW).
Se puede utilizar con configuraciones en modo 2 ó modo 3.
Posteriormente se ha propuesto una variación con pines de corriente contínua y tierra adicionales para soportar cargas de 36 kW de potencia a 200-450 voltios en corriente continua en un primer nivel y hasta 90 kW con 200 amperios en corriente continua para el nivel 2.
-Tipo 2: VDE-AR-E 2623-2-2 o Mennekes.
Mennekes es una copañía alemana de componentes eléctricos y ha propuesto un estándar de protocolo y conector para carga de vehículos que es una de las opciones con más posibilidades en Europa.
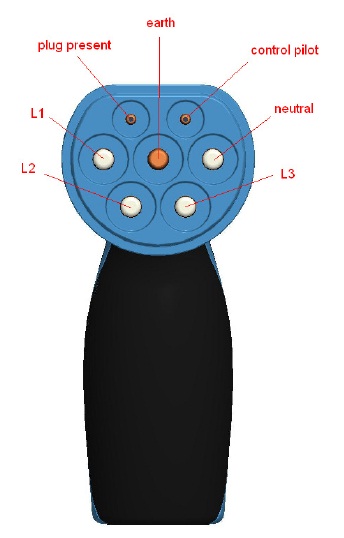
El aspecto del conector se muestra en la siguiente imagen.

Está compuesto por 7 contactos arreglados en una forma circular de 55 mm. con una parte plana. El conjunto de cotactos incluye 3 fases de corriente alterna, un neutro, una toma de tierra y 2 contactos de señal. Uno de ellos es para gestionar la carga mediante la comunicación entre el vehículo y la estación de carga y el otro detecta la presencia del coche. Se muestran identificados a continuación:
Este sistema de carga se conecta a la red de suministro de corriente alterna, bien en modo 2 o modo 3, con las siguientes características:
- Tensión monofásica, 230 voltios hasta 16 amperios (hasta 3.7 kW).
- Tensión trifásica, 380 voltios hasta 63 amperios (hasta 43.8 kW).
-Tipo 3: Scame o EV Plug Alliance.
Es un conector creado por la EV Plug Alliance, unión entre Schneider, Legrand y Scame, también conocido como conector Scame. Es otra de las apuestas fuertes para implantar la electromovilidad en el mercado europeo.

Es capaz de proporcionar carga monofásica a 220 voltios o trifásica a 380 voltios hasta 22.2 kW (hasta 32 amperios con corriente trifásica de 400 voltios).

Puede tener 5 o 7 contactos en el conector, formados por las 3 fases, neutro, tierra y 2 de comunicación con la estación de recarga. Este conector está concebido para ser utilizado en modo 3 principalmente.
-Tipo 4: TEPCO - JARI - CHAdeMO
CHAdeMO es una asociación formada por Tepco, Nissan, Mitsubishi, Fuji Heavy Industries (fabricante de Subaru) y Toyota. El estándar CHAdeMO permite la carga rápida mediante corriente contínua, es decir, traslada el la conversión y rectificación de corriente al exterior del vehículo y aporta corriente contínua de forma directa al pack de baterías.Es el formato que permite una carga más rápida y es un candidato internacional para este tipo de proceso. El conector utilizado se muestra a continuación y también se denomina Jari o TEPCO, ya que ha sido establecido por la Compañía Eléctrica de Tokio (Tokio Electric Power Company).

El conector dispone de un total de 10 contactos, de los que los dos de mayor diámetro son los polos positivo y negativo que aportan la corriente continua y los otros 8 son una combinación de comunicaciones analógicas y digitales para la gestión y control de la carga. Las conexiones físicas más importantes en este sistema se muestran en la siguiente imagen:


Este sistema es un modo 4 y aporta una intensidad máxima de 100 amperios a 500 voltios con corriente continua, lo que implica hasta 50 kW de potencia. Esta elevada potencia requiere una conexión de la estación de recarga a la red de alta tensión, generalmente con transformador propio.
Estos son los principales sistemas que se encuentran hoy en día en el mercado. Seguro que, en no mucho tiempo, algunos de ellos se convertirán en estándar y otros desaparecerán, pero en la actualidad están condenados a coexistir. Eso sí, los fabricantes tendrán que estar atentos a su evolución para evitar que su modelo se convierta en el próximo HD-DVD.
- Fuentes:
Información estándar IEC 62196
Wikipedia
Conectores IEC 62196
Forococheselectricos.com
Mennekes
Información Mennekes
Scame
ecomove.es
Schneider-electric
Scame
Información estándar TEPCO - CHAdeMO
Wikipedia
International Energy Agency
Chademo
- Imágenes:
Depiladora Patty:
http://eyeonspringfield.tumblr.com
Cargadores móvil:
http://www.celulais.com/
Graymito:
http://plusplusdance.tumblr.com/
Carga inductiva:
http://gajitz.com/look-mom-no-cord-induction-charger-for-electric-cars/
Modos de carga
Schneider-electric
SAE J1772
http://carstations.com/types/j09
http://www.sae.org/mags/aei/enrg/7479
Mennekes
Bluemobility
http://elbil.pbworks.com/f/MENNEKES%2Band%2BEV.pdf
Scame:
Scame.com
Evplugalliance
CHAdeMO:
Thetruthaboutcars
http://www.uppladdning.nu/OutletsInfo.aspx
Chademo.com






























